02 串口配置
作者:李源龙 | 最后修改:2026-04-01
一、演示功能概述
本篇文档主要是讲解了 iRTU 的参数设置的串口选项里面的内容都是做什么用的,主要功能包括串口号的选择,串口的波特率设置,串口的数据位,串口的校验位,串口的停止位,485 的转向脚,485 的转向时间。
二、准备硬件环境
准备一块 Air780EHM 核心板:点击购买
三、准备软件环境
1.烧录工具:Luatools 工具
2.Air780EHM 烧录需要的 irtu 固件:固件版本
3.tcp 服务器测试地址: https://iot.luatos.com/#/page6/netlab。 详细使用说明参考:合宙 TCP/UDP web 测试工具使用说明
四、功能选项讲解
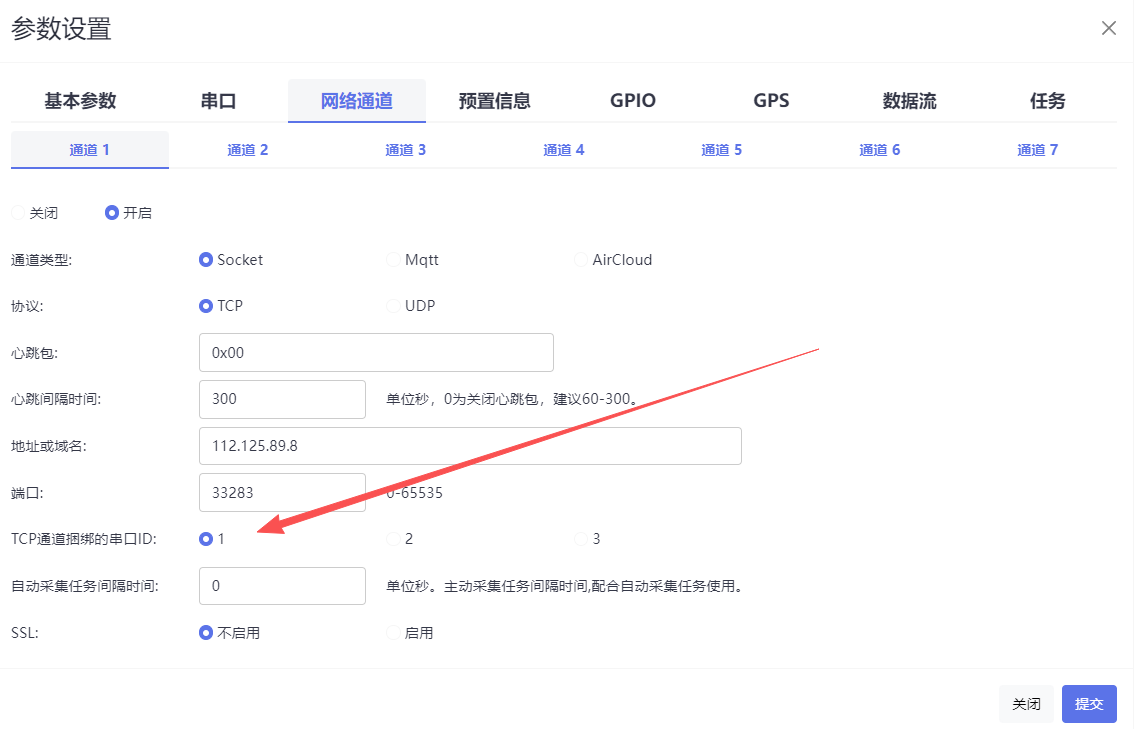
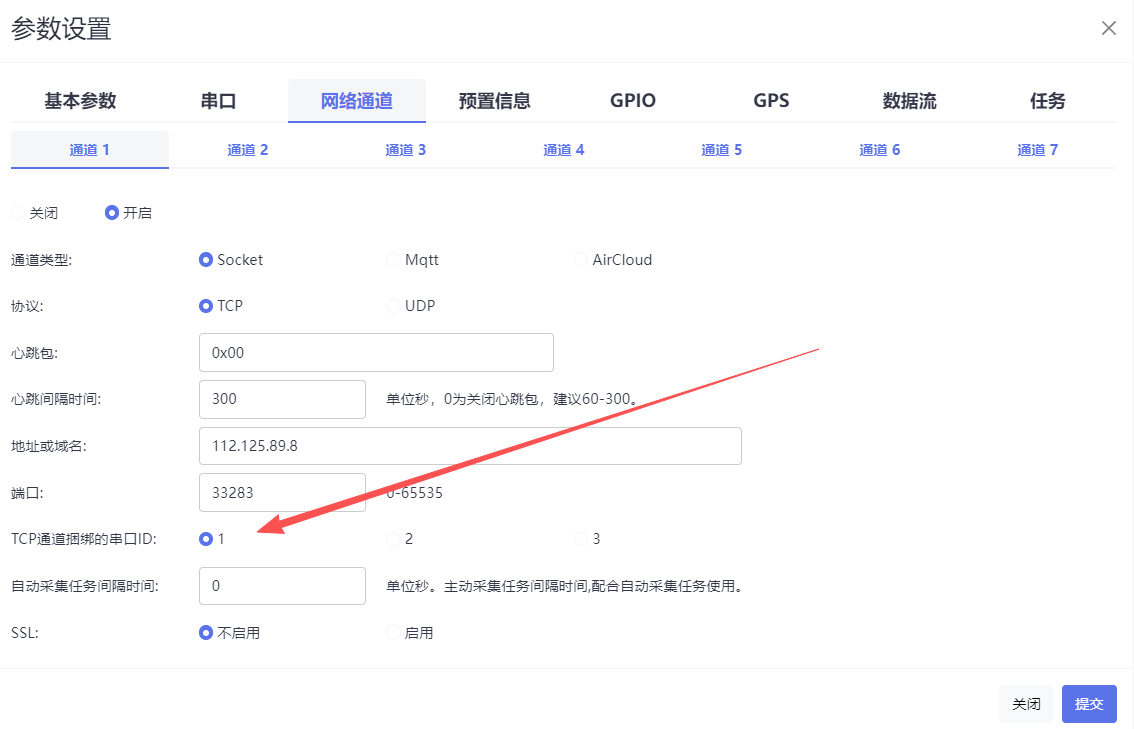
本次功能展示统一使用网络通道配置,服务器选择为 tcp 服务器:
4.1 串口号的选择
1.功能解释:关闭:不开启串口配置,无法进行数据收发。开启:开启单个串口号的配置
2.举例:

串口 1,串口 2,串口 3 都是通过开启的方式打开,进行接收数据,需要注意的是,串口的开启和服务器之间是有关联,在网络通道配置的话,打开使用哪个串口,对应的捆绑的串口 ID 就必须是打开的那个串口,如果选择开启串口 2 的话,通道捆绑的串口 ID 就必须是串口 2,哪个串口和服务器做交互,绑定哪个串口。
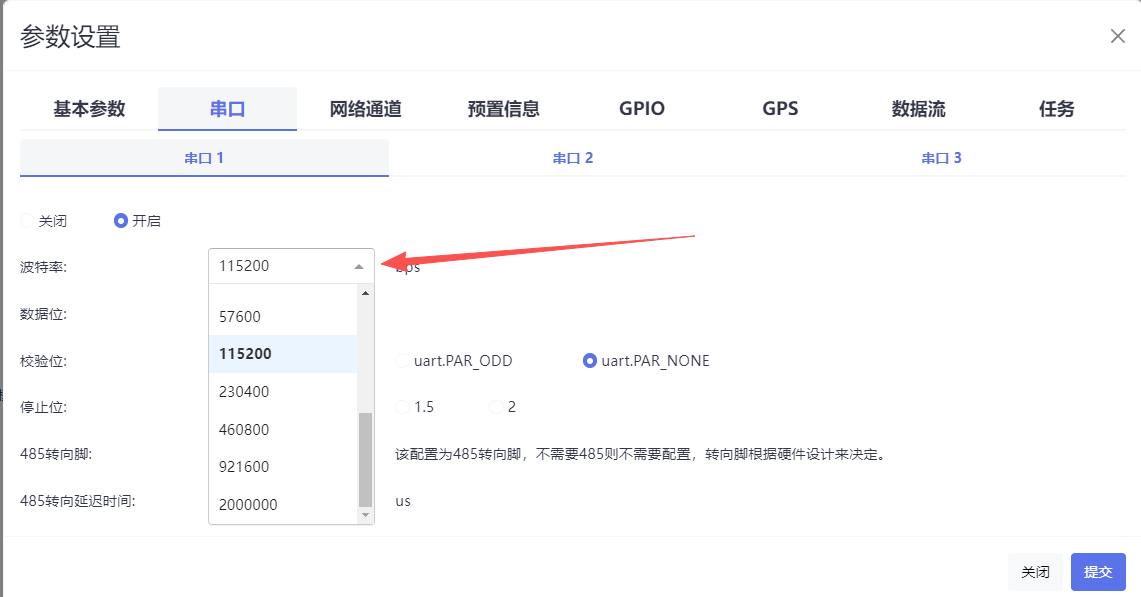
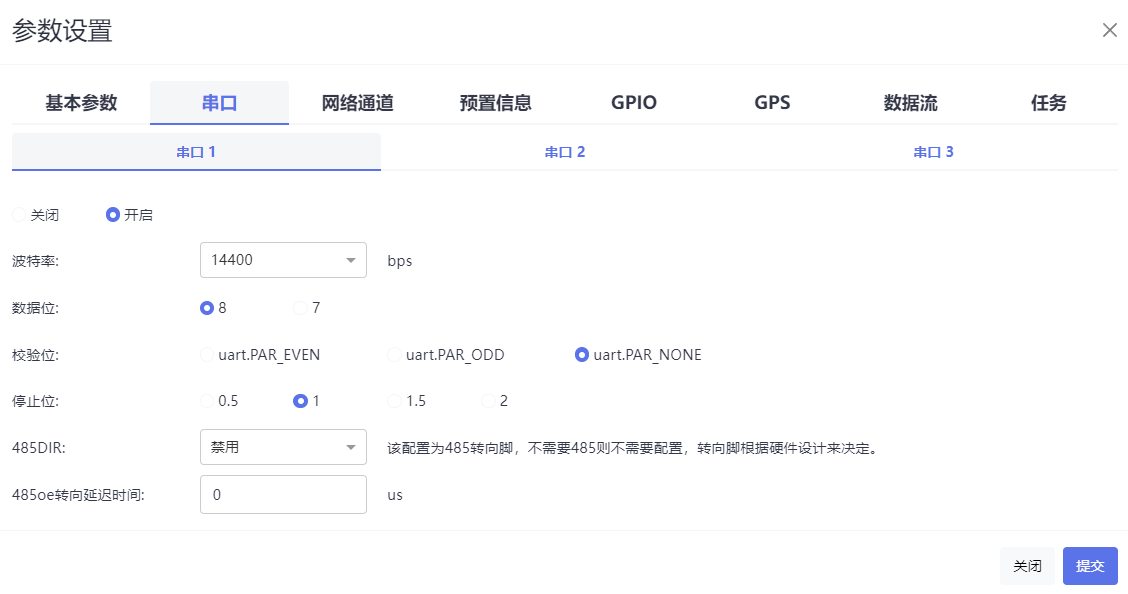
4.2 波特率
1.功能解释:波特率的选择:{2000000,921600,460800,230400,115200,57600,38400,19200,14400,9600,4800,2400,1200,600}
2.举例:
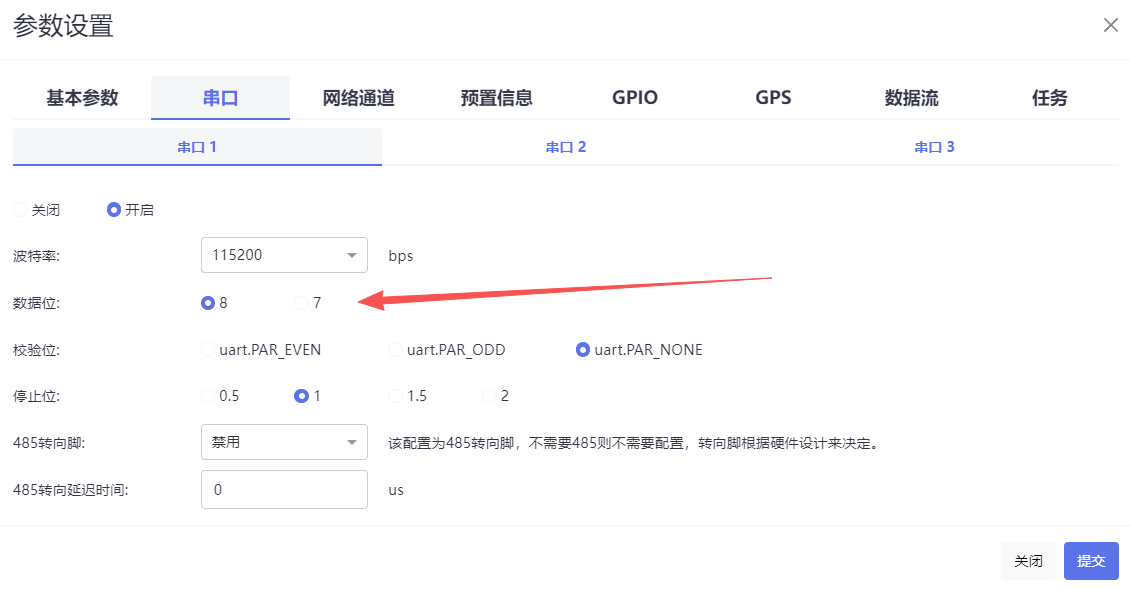
4.3 数据位
1.功能解释:数据位的选择:
8:8 位数据位,7:7 位数据位,默认 8 位数据位。
2.举例:
4.4 校验位
1.功能解释:校验位的选择:
uart.PAR_EVEN:uart.Even,uartPAR_ODD:uart.Odd;uartPAR_NONE:uart.None,默认 uartPAR_NONE。
2.举例:

4.5 停止位
1.功能解释:停止位的选择:
0.5:0.5 位停止位,1:1 位停止位,1.5:1.5 位停止位,2:2 位停止位
2.举例:
4.6 485 转向脚
1.功能解释:485 的转向脚,
RS-485 的“转向”就像使用对讲机,通过控制一个“开关”(收发使能引脚)来切换听和说的状态,确保同一时间只有一方说话,避免冲突,默认禁用
补充说明:
核心目的:RS-485 是半双工通信,数据线只有一对,所以需要方向切换来分时复用线路,实现双向通信
实现方式:这个“开关”通常由 MCU 的一个 GPIO 引脚控制 RS485 芯片的使能端,高电平时芯片处于发送状态(说),低电平时处于接收状态(听)
如果硬件有处理转向则选择禁用即可。485 转向时间填 0。如果使用,485 模式下的 rx 方向 GPIO 的电平默认是 0
2.举例:

这边选择的 485 转向脚 是 gpio20,波特率 9600,转向时间设置的是 20000us。
4.7 485 转向延迟时间:
1.功能解释:RS-485 的转向时间指的是在半双工通信中,收发器从发送状态切换到接收状态(或反之)所需的最短稳定时间,以确保数据帧的末尾不被破坏或丢失,默认 0。
单位 us, 9600 波特率填 20000。这个是经验值,其余波特率可以参考这个波特率,根据比例自行计算,如 4800 波特率是 20000*9600/4800 = 40000;
2.举例:

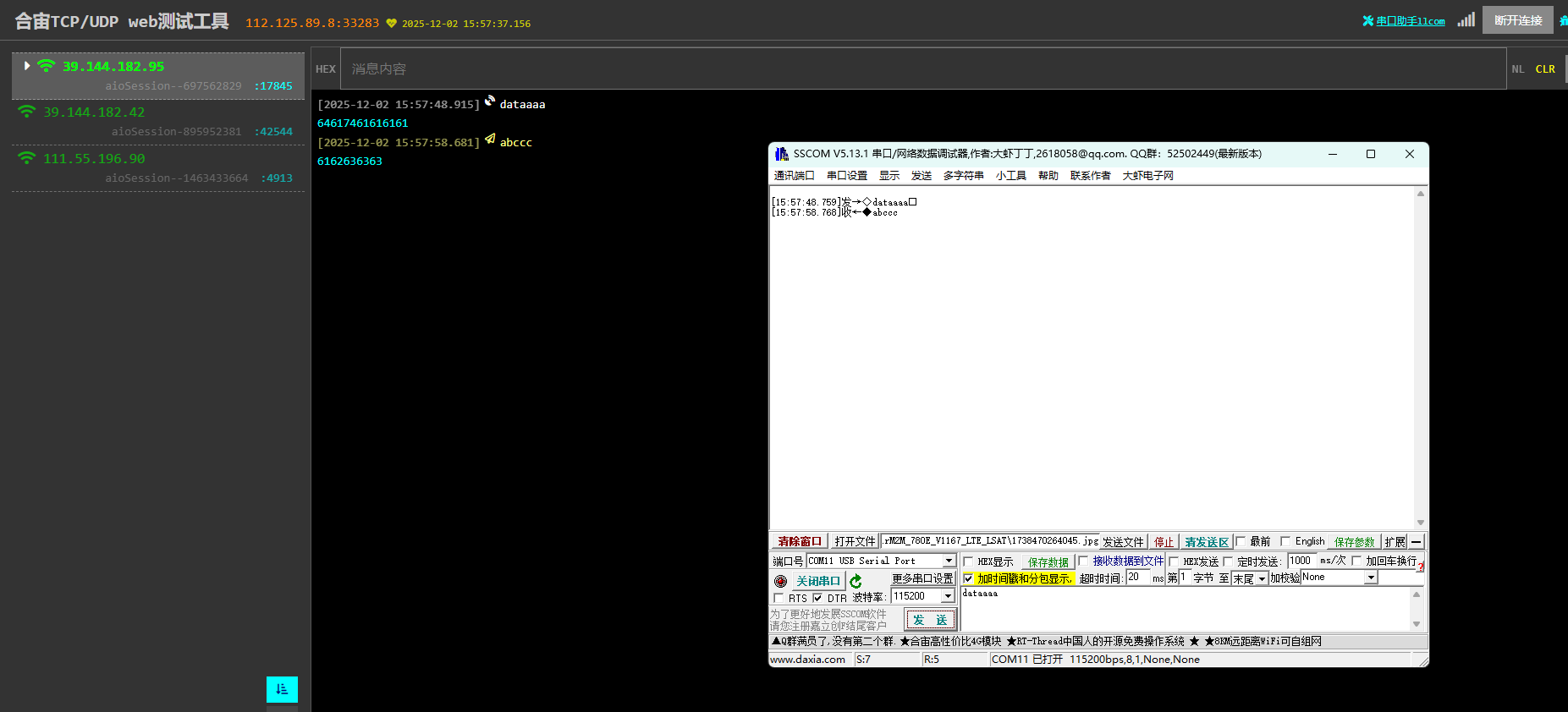
4.8 示例测试
1.串口配置页面:

2.数据收发结果:
五、总结
本文演示如何在 Air780EHM 核心板上面,用 irtu 固件,展示串口的配置功能